教員紹介
ホーム > [ 機械システム工学専攻 ] 教員紹介
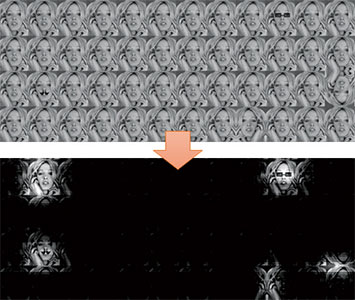
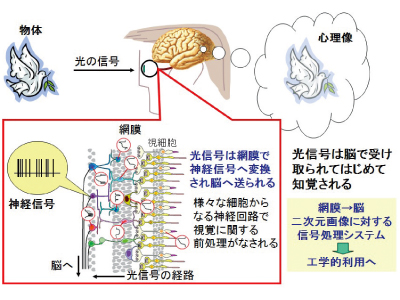
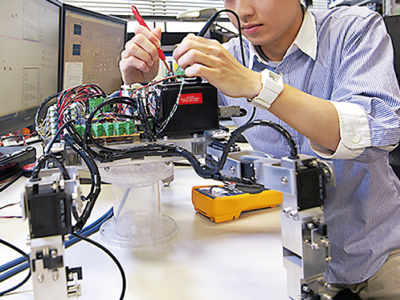
間違いに「気づく」マシンビジョン
Babyloid
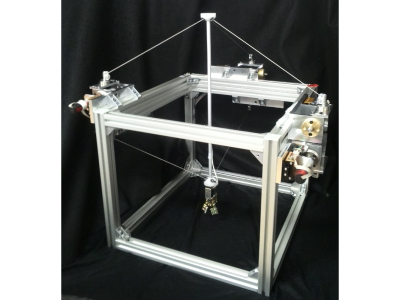
パラレルワイヤ駆動方式を用いた次世代産業用ロボットの開発
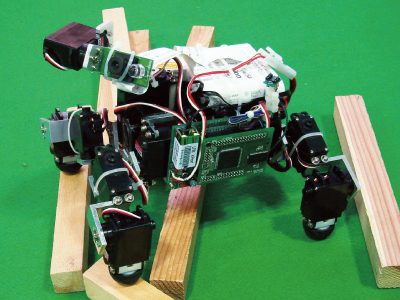
研究室で開発したレスキューロボット
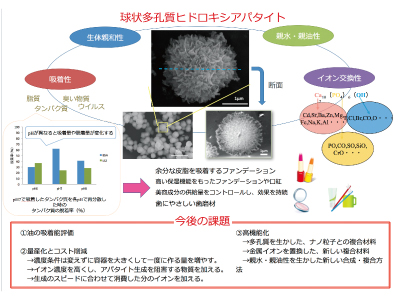
合成したマリモアパタイト™の電子顕微鏡画像
道具を巧みに使いこなす世界初のヒューマノイドお茶会ロボット
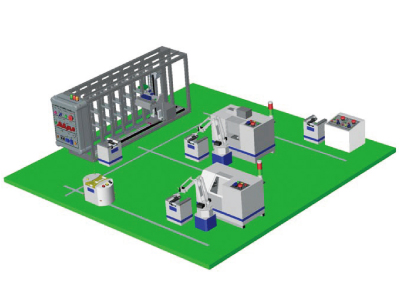
生産システムシミュレーション
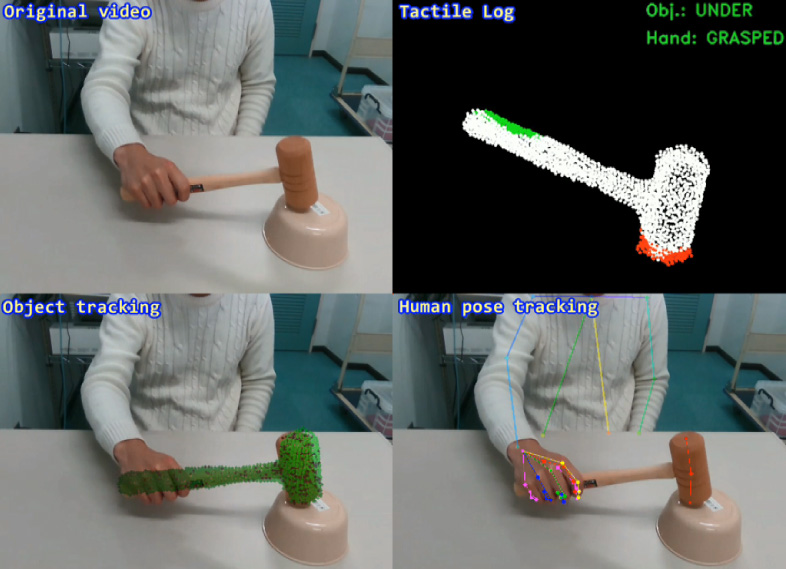
デモンストレーション動作解析による道具の使用方法の理解
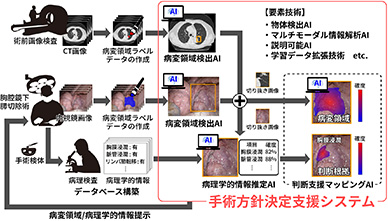
手術方針決定支援システム
教育目標・カリキュラム